About me
I am currently starting a startup called Tinamu Labs, which develops technologies to convert commercially available drones into camera equipment reaching professional standards. By combining a novel positioning system and emulation software, we enable accurate and repeatable drone flights in any kind of lighting and environmental condition. Therefore, we create new possibilities for filmmakers and broadcasters allowing them to create stunning camera shots to the highest degree of flexibility.
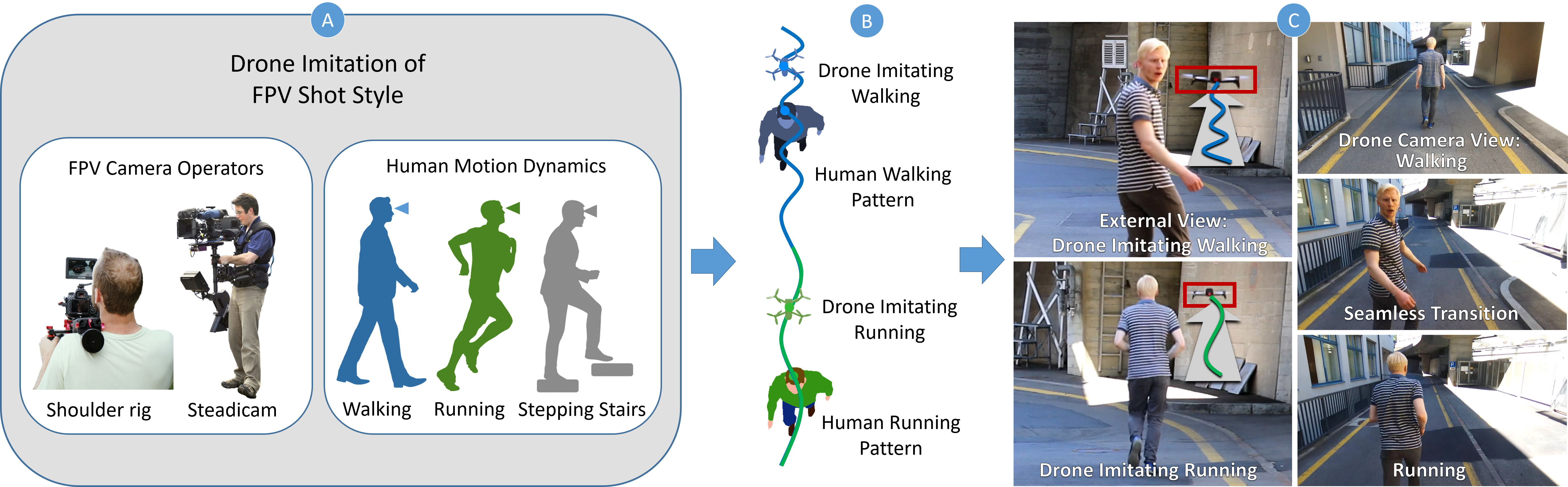
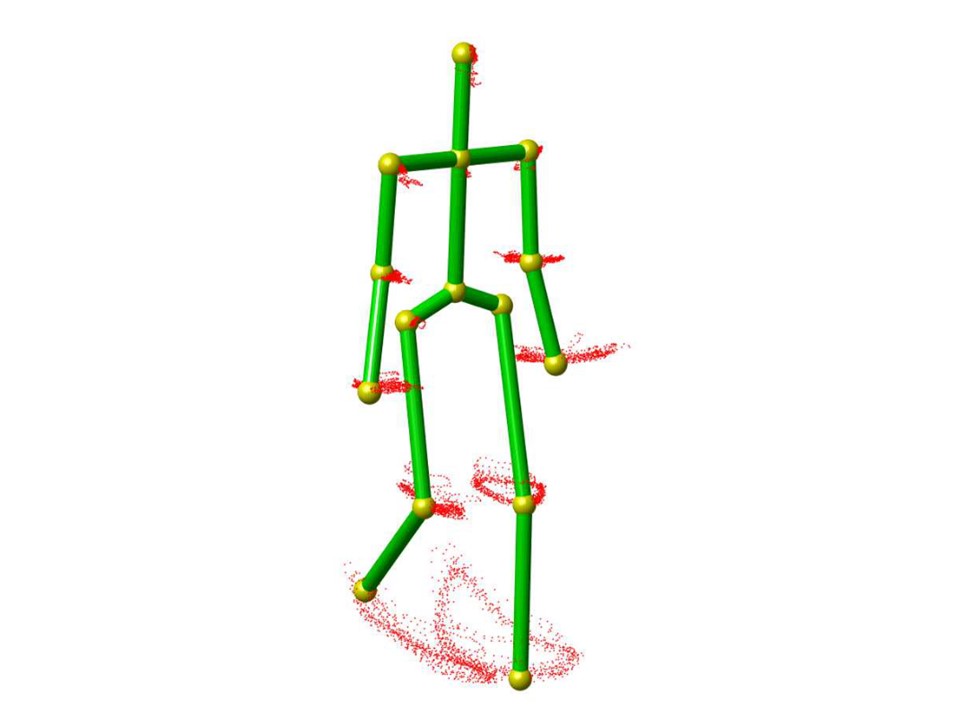
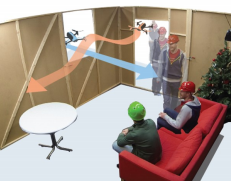
I did my PhD at the Advanced Interactive Technologies group of the Institute of Pervasive Computing at the Swiss Federal Institute of Technology Zürich (ETH). My Ph.D. advisor is Prof. Dr. Otmar Hilliges. The main topic of the thesis was in the field of GPS less navigation, drone cinematography and real-time human motion capturing.
In 2013, I received my MSc from ETH Zurich in Electrical Engineering with a main focus on Control and Estimation.
Awards
Patents
- Nägeli, T. et al. Flycon: "Method and computer program for detecting the form of a deformable object", 2018, EU Patent (pending).
- Nägeli, T. et al. VirtualRails: "A Drone and Method of Controlling Flight of a Drone", 2017, EU Patent (pending).
Media Coverage
- Science Daily 2016
- MIT News 2016
- NZZ 2016
- Golem.de 2016
- 20Minuten 2016
- ETH News 2016
- Limmattalerzeitung 2016
Publications



Master and Semester Theses
- Environment-Independent Formation Flight for Micro Aerial Vehicles — Development of a MAV swarm with a vision based distributed estimation and controlling strategy at IFA and DRZ, ETH Zurich
- Improved Kalman Filtering for Attitude and Position Control of a quadrotor using Optical Flow — Mathematical analysis of a quadrotor and the filter implementation at IFA, DRZ and CVG, ETH Zurich
- Automatic Car Racing by Apprenticeship Learning — Autonomous machine learning of a race track by human demonstrations.
Academic Activities
Student Theses
- Flycon: Distributed Human Pose Estimation using Quadrotors. Silvan Pluess 2017, MA
- Real-Time Subject Position Estimation based on Visual Tracking for Intelligent Cinematography. Samuel Oberholzer 2017, MA
- Distributed Formation Estimator for a Flying VICON System. Peter Worsnop, 2016, SA
- Collision Avoidance for Micro Quadrotors stabilized by an adapted VIO algorithm. Lukas Meier 2016, MA
- Visual Inertial Odometry for Environment Independent Autonomous Flight of Micro Aerial Vehicles. Nicolas de Palezieus, 2015, MA
- Machine learning based Feature Extraction and Tracking. Yfan Wang, 2015, SA
- Developpment of a Android App to control MAV. Christian Kuhn and Thomas Brunner, 2015, Group Work
- Implementation of the MSCKF VIO algorithm. Partha Gosh, 2015, SA
- Learning How to Avoid Walls and Obstacles with a Quadcopter. Michael Schaeuble, 2015, SA
- Realtime People Detection in the Infrared Spectrum on a Credit-Card-Sized Computer. Julius Kuemmerle, 2015, SA
- Developpment of a Motor Controller board for MAV's. Florian Schmied, 2015, SA
- Human Motion Estimation with Body Worn Sensors. Dario Roetlisberger, 2015, MA
- An Immersive 3D FPV System. Simon Hecker, 2014, SA
- Developpment of a Camera Gimbal. Alexander Cebulla, 2014, BA
Teaching
- Linear Algebra (D-INFK) — HS2017;
- Linear Algebra (D-INFK) — HS2016;
- Parallel Programming (D-INFK) — FS2016;
- Linear Algebra (D-INFK) — HS2015;
- Parallel Programming (D-INFK) — FS2015;
- Informatik 1 (D-INFK) — FS2014;
- Informatik 1 (D-INFK) — FS2013;
- User Interface Engineering (D-INFK) — HS2013