A mobile robot is equipped with multiple ultra-wideband (UWB) units and tracks a subject with a single UWB tag. Using a novel ranging scheme allows us fast sampling of ranges that are fused in an extended Kalman filter to track the 3D position of the target. With a per-unit calibration we achieve a 10 cm average position error at a distance of about 4 meters. We incorporate the tracking into a relative flight mode of a quadrotor and a path-following scheme showing the applicability and real-world performance of our system.
Abstract
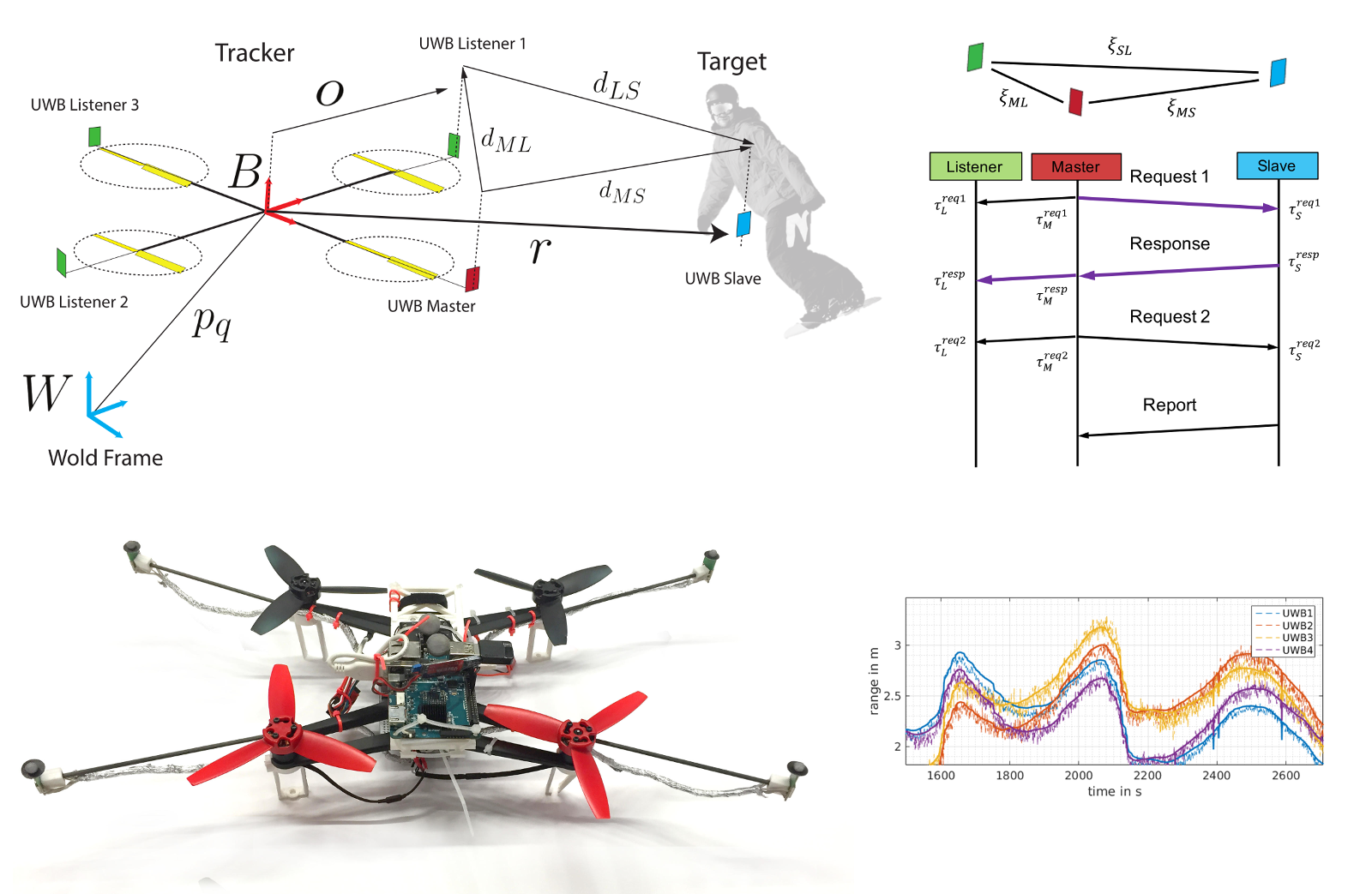
We present a tracking system based on ultrawideband (UWB) radio tranceivers mounted on a robot and a target. In comparison to typical UWB localization systems with fixed UWB tranceivers in the environment we only require instrumentation of the target with a single UWB tranceiver. Our system works in GPS-denied environments and does not suffer from long-term drift and limited fields of view. This paper reports the localization algorithm and implementation details. Additionally, we demonstrate a quantitative evaluation of the accuracy (10cm average position error for a square with side-length of 4m) and application scenarios with a quadrotor flying in close proximity to a person and handling occlusion of the target.
Video
Acknowledgments
We thank Nicolas de Palezieus for his help with creating the videos. We are also grateful for the valuable feedback from the associate chairs and external reviewers. This work was partially funded by the Swiss Science Foundations (UFO 200021L 153644) and Microsoft Research.