Seyedmorteza Sadat passed the doctoral exam. Congratulations!
Research Overview

The AIT lab conducts research at the fore-front of human-centric computer vision. Our core research interests are algorithms and methods for the spatio-temporal understanding of how humans move within and interact with the physical world. We develop learning-based algorithms, methods and representations for human- and interaction-centric understanding of our world from videos, images and other sensor data. Application domains of interest include Augmented and Virtual Reality, Human Robot Interaction and more. Please refer to our publications for more information.
The AIT Lab, led by Prof. Dr. Otmar Hilliges, is part of the Institute for Intelligent Interactive Systems (IIS), in the Department of Computer Science at ETH Zurich.
Latest News
-

-

Zijian Dong passed the doctoral exam. Congratulations!
-

Hsuan-I Ho passed the doctoral exam. Congratulations!
-

Zicong Fan passed the doctoral exam. Congratulations!
-

Marcel C. Buehler passed the doctoral exam. Congratulations!
Connect
Latest Projects
2026
Lixin Xue,
Chengwei Zheng,
Georgios Paschalidis,
Chen Guo,
Manuel Kaufmann,
Juan Zarate,
Dimitrios Tzionas
Computer Vision and Pattern Recognition (CVPR), 2026
Gent Serifi,
Marcel C. Buehler
Computer Vision and Pattern Recognition (CVPR), 2026

International Conference on 3D Vision (3DV), 2026
 Invited by Voxel 51 Best of 3DV 2026
Invited by Voxel 51 Best of 3DV 2026
Marcel C. Buehler,
Ye Yuan,
Xueting Li,
Yangyi Huang,
Koki Nagano,
Umar Iqbal
International Conference on 3D Vision (3DV), 2026
2025
Onat Vuran,
Hsuan-I Ho
British Machine Vision Conference (BMVC), 2025

Hsuan-I Ho,
Chen Guo,
Po-Chen Wu,
Ivan Shugurov,
Chengcheng Tang,
Abhay Mittal,
Sizhe An,
Manuel Kaufmann*,
Linguang Zhang*
* Equal contribution
International Conference on Computer Vision (ICCV), 2025
First author awarded Outstanding Reviewer (321/11894)

International Conference on Computer Vision (ICCV), 2025
Accepted as Highlight (Top 11.9%)
Chen Guo*,
Junxuan Li*,
Yash Kant,
Yaser Sheikh,
Shunsuke Saito,
Chen Cao
* Equal contribution
Computer Vision and Pattern Recognition (CVPR), 2025
Computer Vision and Pattern Recognition (CVPR), 2025
Computer Vision and Pattern Recognition (CVPR), 2025
Siyuan Bian,
Chenghao Xu,
Yuliang Xiu,
Artur Grigorev,
Zhen Liu,
Cewu Lu,
Michael J. Black,
Yao Feng
Computer Vision and Pattern Recognition (CVPR), 2025
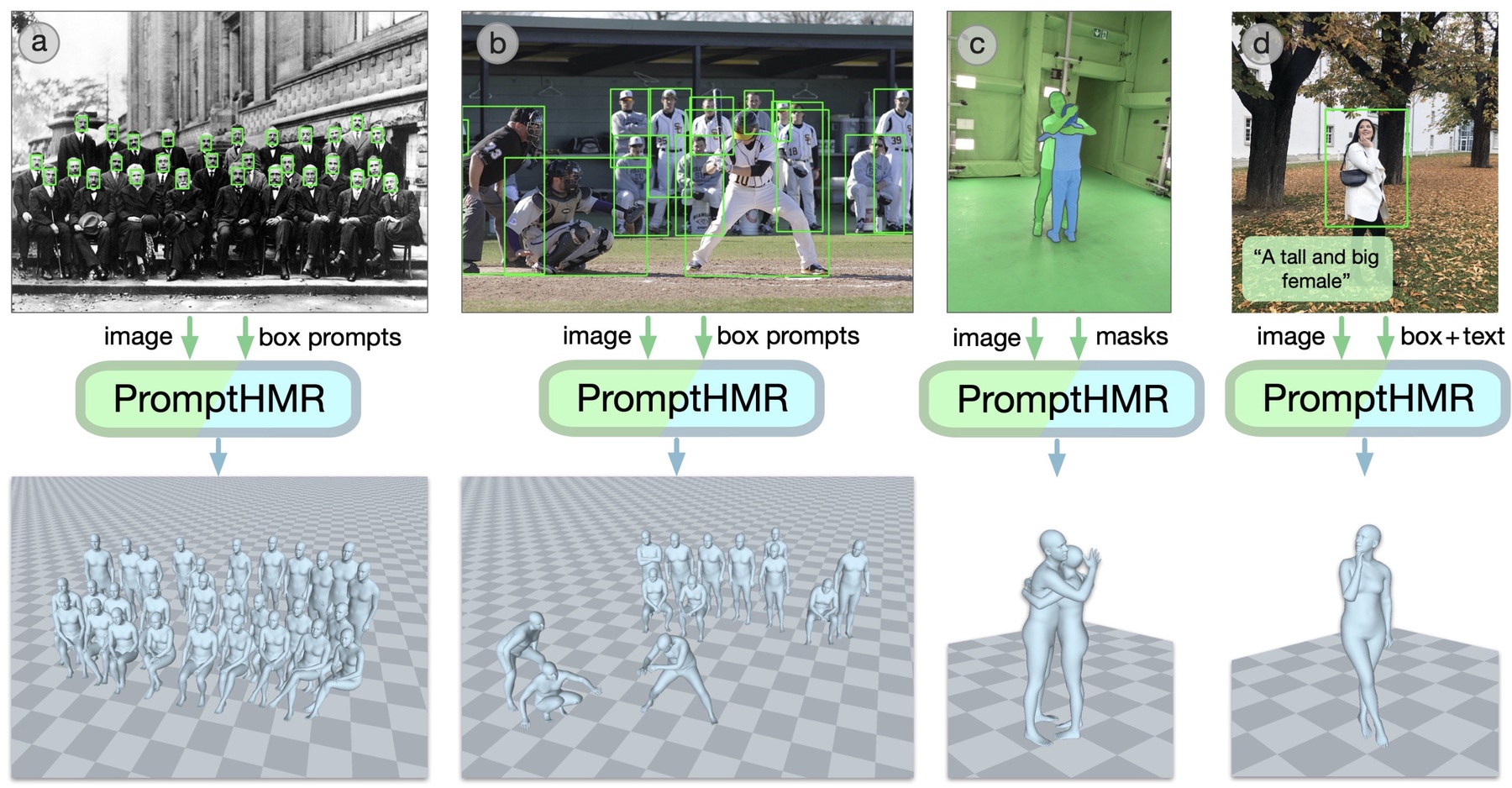
Yufu Wang,
Yu Sun,
Priyanka Patel,
Kostas Daniilidis,
Michael J. Black,
Muhammed Kocabas
IEEE/CVF Conf. on Computer Vision and Pattern Recognition (CVPR), 2025
Jaeseong Lee,
Taewoong Kang,
Marcel C. Buehler,
Minjung Kim,
Sungwon Hwang,
Junha Hyung,
Hyojin Jang,
Jaegul Choo
International Conference on Learning Representations, 2025

Seyedmorteza Sadat,
Manuel Kansy,
Otmar Hilliges,
Romann M. Weber
International Conference on Learning Representations (ICLR), 2025

Seyedmorteza Sadat,
Otmar Hilliges,
Romann M. Weber
International Conference on Learning Representations (ICLR), 2025
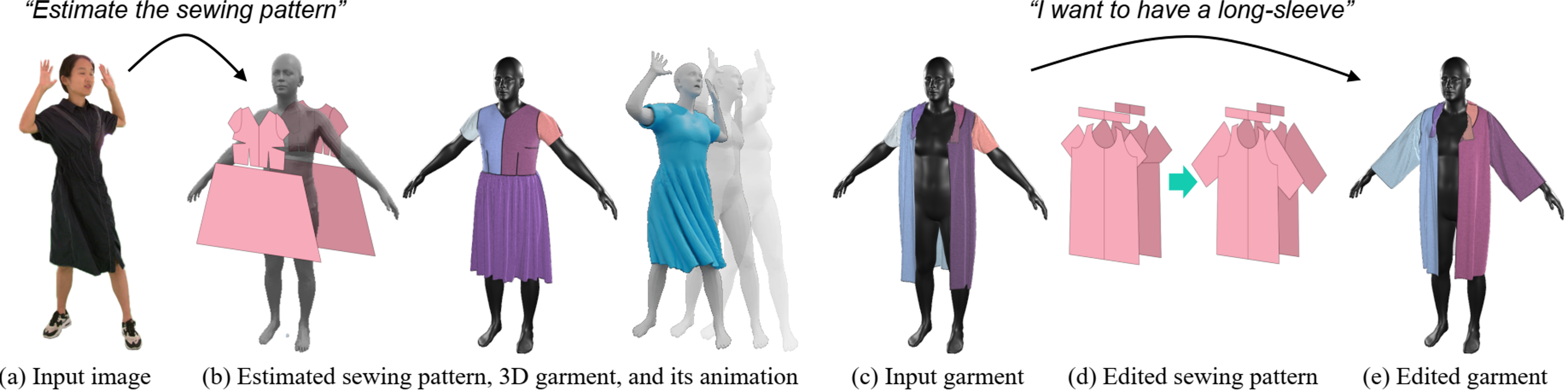
Boxiang Rong*,
Artur Grigorev*,
Wenbo Wang,
Michael J. Black,
Bernhard Thomaszewski,
Christina Tsalicoglou,
Otmar Hilliges
* Equal contribution
International Conference on 3D Vision 2025, 2025
2024
Zhengyi Luo*,
Jinkun Cao*,
Sammy Christen,
Alexander Winkler,
Kris Kitani,
Weipeng Xu
* Equal contribution
Annual Conference on Neural Information Processing Systems (NeurIPS), 2024

Seyedmorteza Sadat,
Jakob Buhmann,
Derek Bradley,
Otmar Hilliges,
Romann M. Weber
Annual Conference on Neural Information Processing Systems (NeurIPS), 2024
Phong Tran,
Egor Zakharov,
Long-Nhat Ho,
Liwen Hu,
Adilbek Karmanov,
Aviral Agarwal,
McLean Goldwhite,
Ariana Bermudez Venegas,
Anh Tuan Tran,
Hao Li
SIGGRAPH Asia 2024 (TOG), 2024
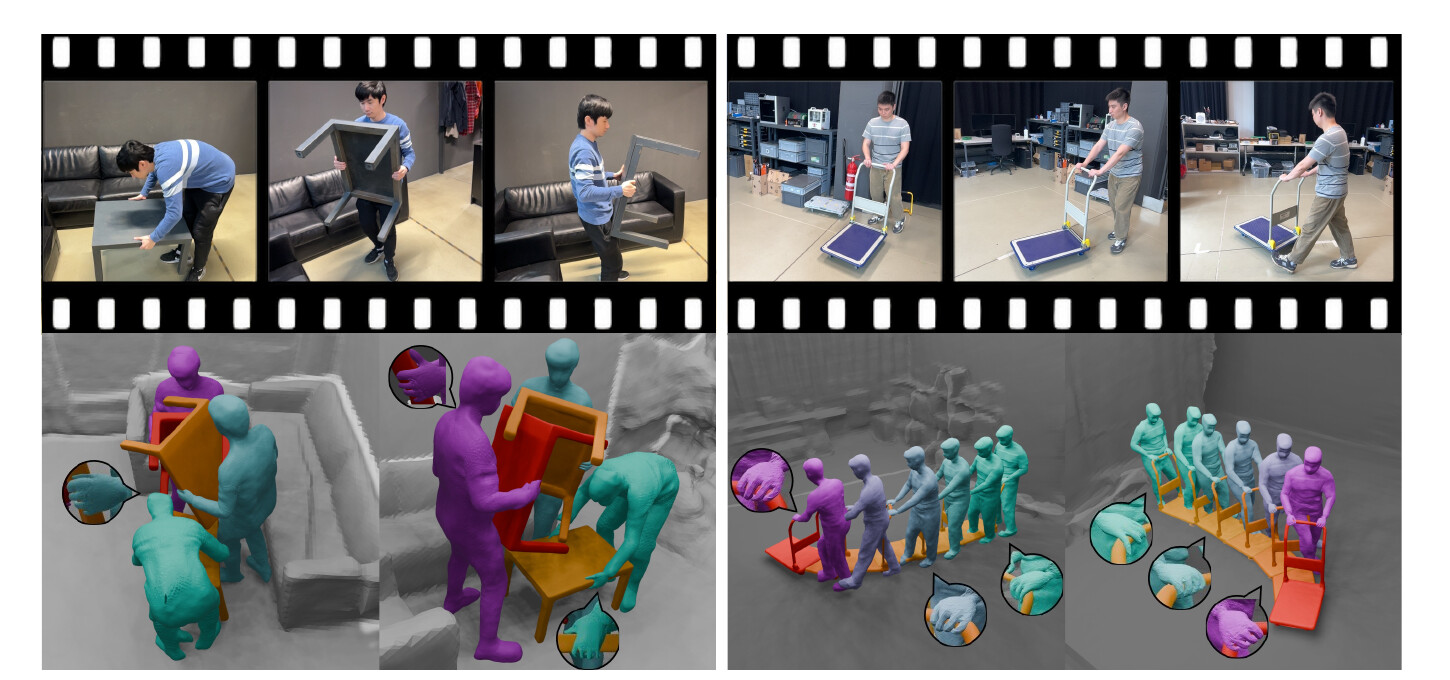
Bonan Liu*,
Handi Yin*,
Manuel Kaufmann,
Jinhao He,
Sammy Christen,
Jie Song,
Pan Hui
* Equal contribution
SIGGRAPH Asia 2024 (TOG), 2024
Sammy Christen,
Shreyas Hampali,
Fadime Sener,
Edoardo Remelli,
Tomas Hodan,
Eric Sauser,
Shugao Ma,
Bugra Tekin
Conference paper at SIGGRAPH Asia, 2024
Marcel C. Buehler,
Gengyan Li,
Erroll Wood,
Leonhard Helminger,
Xu Chen,
Tanmay Shah,
Daoye Wang,
Stephan Garbin,
Sergio Orts-Escolano,
Otmar Hilliges,
Dmitry Lagun,
Jérémy Riviere,
Paulo Gotardo,
Thabo Beeler,
Abhimitra Meka,
Kripasindhu Sarkar
Conference paper at SIGGRAPH Asia, 2024

Zicong Fan*,
Takehiko Ohkawa*,
Linlin Yang*,
Nie Lin,
Zhishan Zhou,
Shihao Zhou,
Jiajun Liang,
Zhong Gao,
Xuanyang Zhang,
Xue Zhang,
Fei Li,
Liu Zheng,
Feng Lu,
Karim Abou Zeid,
Bastian Leibe,
Jeongwan On,
Seungryul Baek,
Aditya Prakash,
Saurabh Gupta,
Kun He,
Yoichi Sato,
Otmar Hilliges,
Hyung Jin Chang,
Angela Yao
European Conference on Computer Vision (ECCV), 2024
Chen Guo*,
Tianjian Jiang*,
Manuel Kaufmann,
Chengwei Zheng,
Julien Valentin,
Jie Song,
Otmar Hilliges
* Equal contribution
European Conference on Computer Vision (ECCV), 2024
Tianjian Jiang,
Johsan Billingham,
Sebastian Müksch,
Juan Zarate,
Nicolas Evans,
Martin Oswald,
Marc Pollefeys,
Otmar Hilliges,
Manuel Kaufmann,
Jie Song
European Conference on Computer Vision (ECCV), 2024
Lixin Xue,
Chen Guo,
Chengwei Zheng,
Fangjinhua Wang,
Tianjian Jiang,
Hsuan-I Ho,
Manuel Kaufmann,
Jie Song,
Otmar Hilliges
European Conference on Computer Vision (ECCV), 2024
European Conference on Computer Vision (ECCV), 2024
European Conference on Computer Vision (ECCV), 2024
European Conference on Computer Vision (ECCV), 2024

Sanghwan Kim,
Daoji Huang,
Yongqin Xian,
Otmar Hilliges,
Luc Van Gool,
Xi Wang
European Conference on Computer Vision (ECCV), 2024