
Interactive computational design of quadrotor trajectories: (A) user interface to specifiy keyframes and dynamics of quadrotor flight. (B) An optimization algorithm generates feasible trajectories and (C) a 3D preview allows the user to quickly iterate on them. (D) The final motion plan can be flown by real quadrotors. The tool enables the implementation of a number of compelling use cases such as (B) robotic light-painting, aerial racing and (D) aerial videography.
Abstract
We propose a computational design tool that allows end-users to create advanced quadrotor trajectories with a variety of application scenarios in mind. Our algorithm allows novice users to create quadrotor based use-cases without requiring deep knowledge in either quadrotor control or the underlying constraints of the target domain. To achieve this goal we propose an optimization-based method that generates feasible trajectories which can be flown in the real world. Furthermore, the method incorporates high-level human objectives into the planning of flight trajectories. An easy to use 3D design tool allows for quick specification and editing of trajectories as well as for intuitive exploration of the resulting solution space. We demonstrate the utility of our approach in several real-world application scenarios, including aerial-videography, robotic light-painting and drone racing.
Video
System overview

System workflow schematically. (1) User sketches keyframes. (2) An optimization method generates a feasible trajectory. (3+4) The user can quickly iterate over the trajectory and explore the solution space of feasible trajectories via a physics simulation or a rendered preview (see Fig. 3, D). (5) Final trajectory can be flown with a real MAV.
Gallery
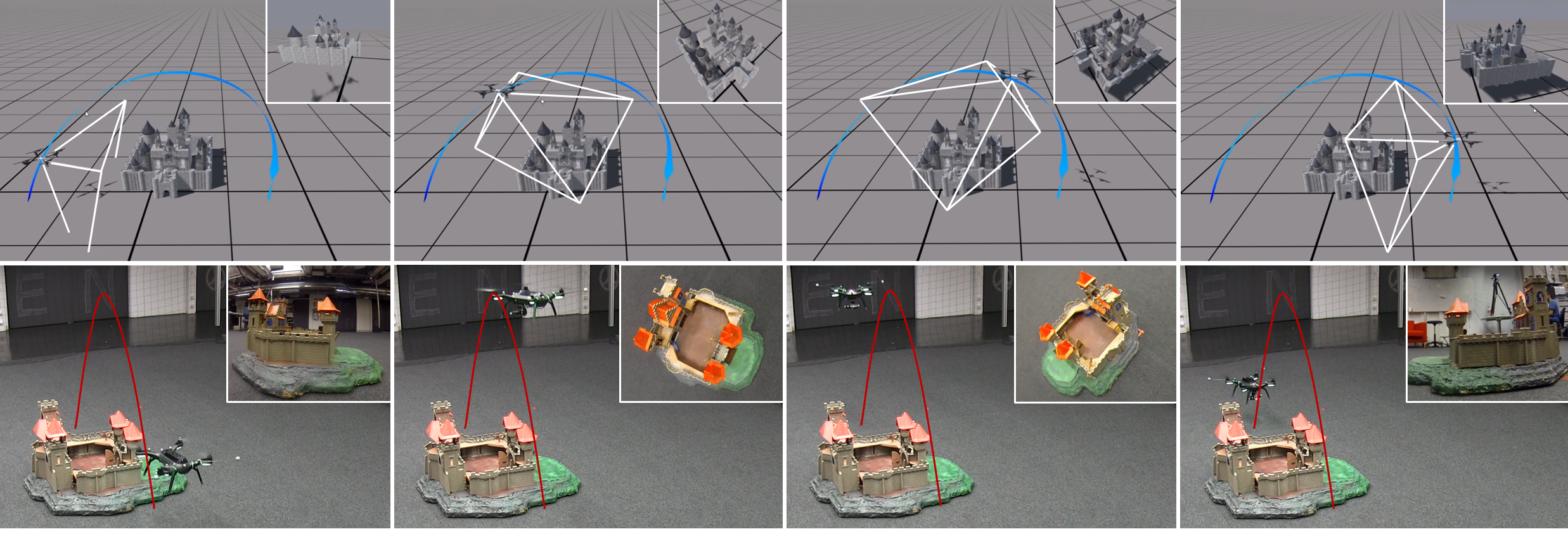
Aerial camera shot of a toy castle. Top row: planned trajectory in our design tool. Bottom row: flown trajectory.
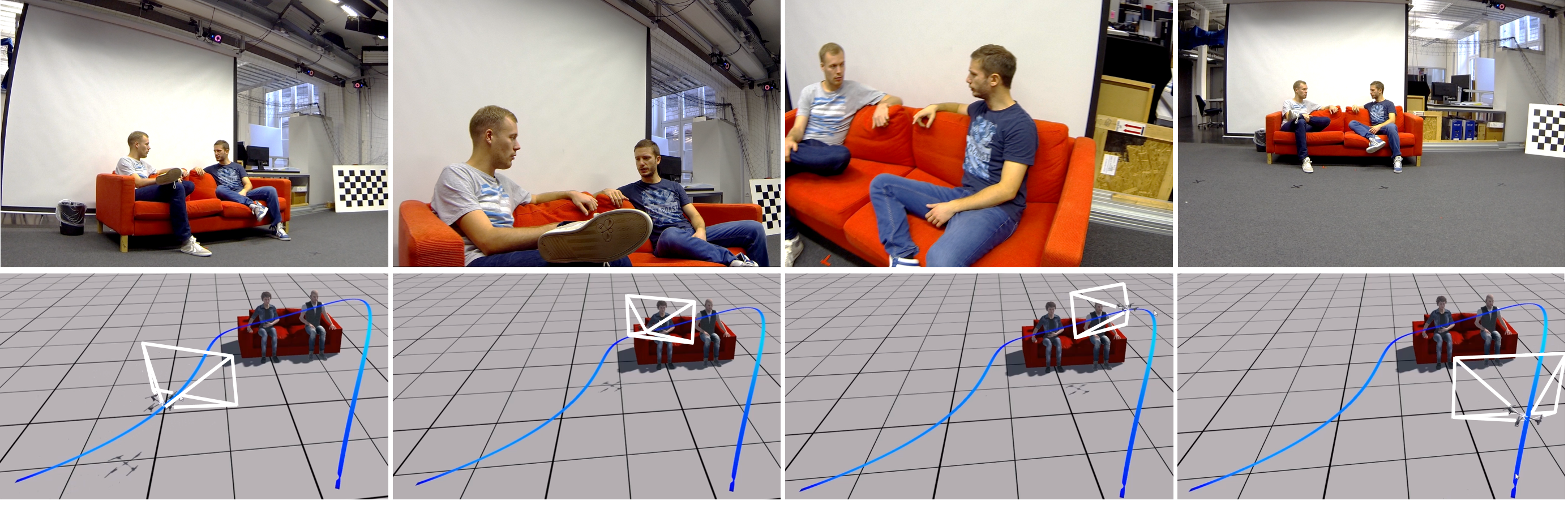
Multi target shot. Top row: frames of the video sequence shot by the onboard camera. Bottom row: according quadrotor positions shown in the preview of the design tool.

(A) Handwritten input. (B) Initial feasible trajectory can be overly smooth. (C) After iteration a feasible and visually pleasing trajecory is found. (D) Final result flown by MAV and captured via long-exposure photography.
Acknowledgments
We thank Cécile Edwards-Rietmann for providing the video voiceover and Gábor Sörös for creating the aerial lightpainting videos. We are also grateful for the valuable feedback from the associate chairs and external reviewers. This work was partially funded by the Swiss Science Foundations (UFO 200021L 153644) and Microsoft Research.