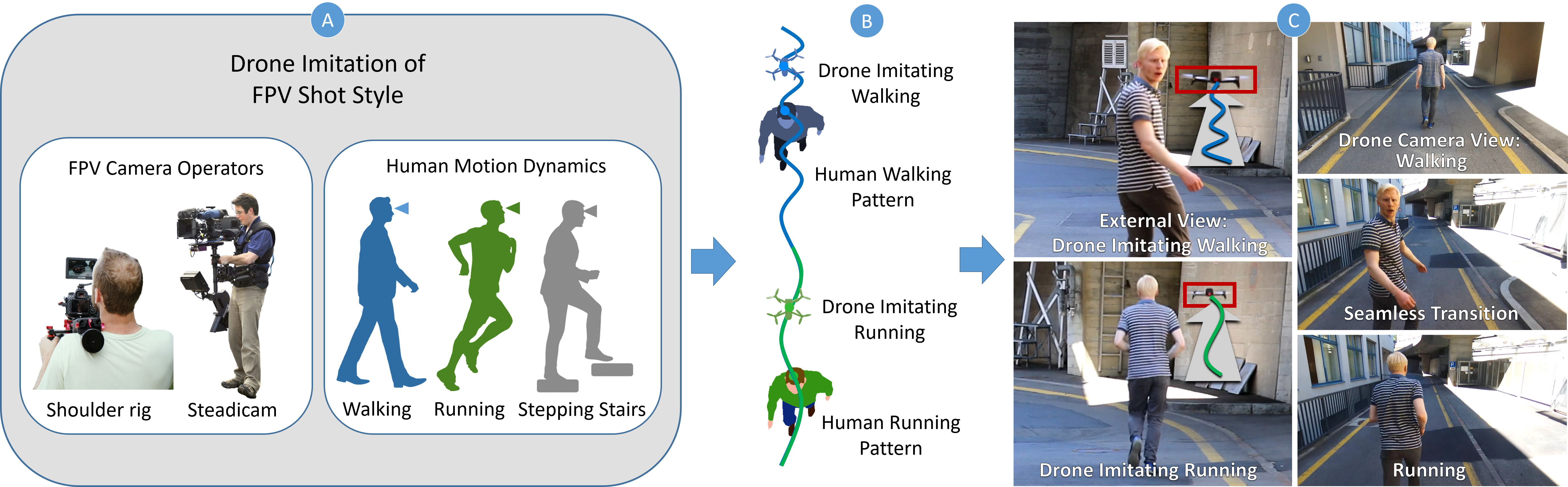
We propose a computational method that leverages the motion capabilities of drones to imitate the visual look of first-person view (FPV) shots. These shots are usually obtained by a human camera operator that follows the action e.g., by walking or running (A). Such footage is intentionally shot to contain motion artifacts. Our method allows a drone to imitate such shots but offers more flexibility. For example, long shots that imitate a shoulder rig operator walking and then running (B). The result video is acquired in a single session, automatically, with a seamless transition between the operator’s motion dynamics (C).
Abstract
We propose an approach to capture subjective first-person view (FPV) videos by drones for automated cinematography. FPV shots are intentionally not smooth to increase the level of immersion for the audience, and are usually captured by a walking camera operator holding traditional camera equipment. Our goal is to automatically control a drone in such a way that it imitates the motion dynamics of a walking camera operator, and in turn capture FPV videos. For this, given a user-defined camera path, orientation and velocity, we first present a method to automatically generate the operator's motion pattern and the associated motion of the camera, considering the damping mechanism of the camera equipment. Second, we propose a general computational approach that generates the drone commands to imitate the desired motion pattern. We express this task as a constrained optimization problem, where we aim to fulfill high-level user-defined goals, while imitating the dynamics of the walking camera operator and taking the drone's physical constraints into account. Our approach is fully automatic, runs in real time, and is interactive, which provides artistic freedom in designing shots. It does not require a motion capture system, and works both indoors and outdoors. The validity of our approach has been confirmed via quantitative and qualitative evaluations.
Accompanying Video
Downloads
- PDF pre-print (Official version at ACM Digital Library)