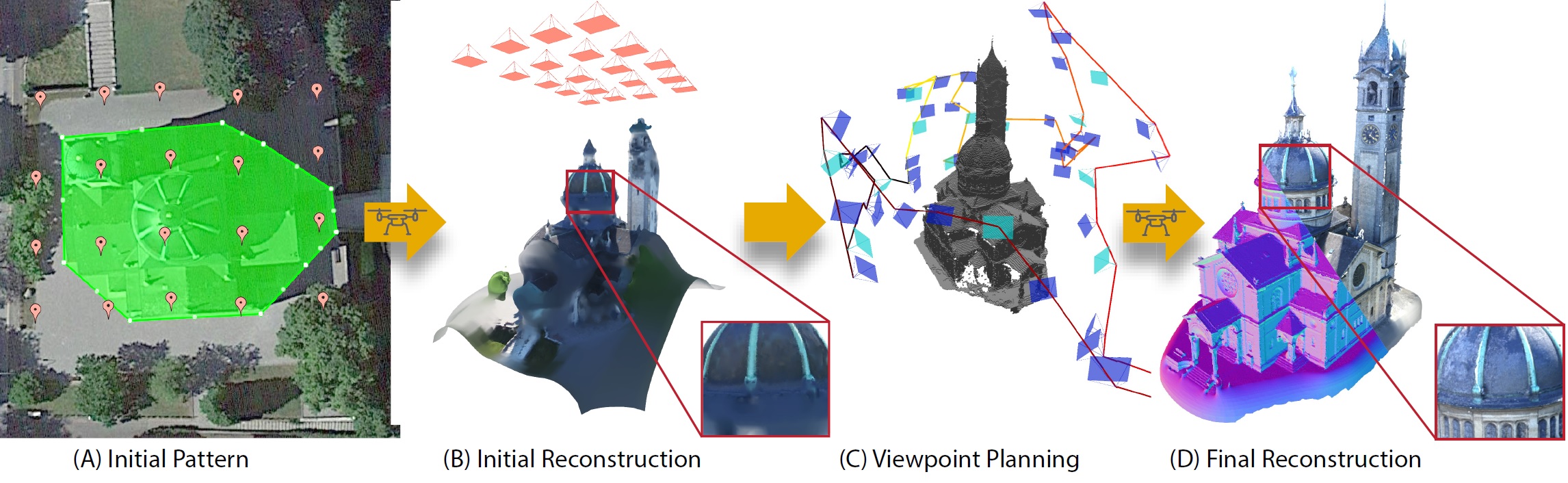
We propose an end-to-end system for 3D reconstruction of building-scale scenes with commercially available quadrotors. (A) A user defines the region of interest (green) on a map-based interface and specifies a patern of viewpoints (orange), flown at a safe altitude. (B) The patern is traversed and the captured images are processed resulting in an initial reconstruction and occupancy map. (C) We compute a viewpoint path that observes as much of the unknown space as possible adhering to characteristics of a purposeful designed camera model. The viewpoint path is only allowed to pass through known free space and thus the trajectory can be executed fully autonomously. (D) The newly captured images are processed to atain the final high-quality reconstruction of the region of interest. The method is capable of capturing concave areas and fine geometric detail.
Abstract
We introduce a new method that effciently computes a set of viewpoints and trajectories for high-quality 3D reconstructions in outdoor environments. Our goal is to automatically explore an unknown area, and obtain a complete 3D scan of a region of interest (e.g., a large building). Images from a commodity RGB camera, mounted on an autonomously navigated quadcopter, are fed into a multi-view stereo reconstruction pipeline that produces high-quality results but is computationally expensive. In this setting, the scanning result is constrained by the restricted fight time of quadcopters. To this end, we introduce a novel optimization strategy that respects these constraints by maximizing the information gain from sparsely-sampled view points while limiting the total travel distance of the quadcopter. At the core of our method lies a hierarchical volumetric representation that allows the algorithm to distinguish between unknown, free, and occupied space. Furthermore, our information gain based formulation leverages this representation to handle occlusions in an effcient manner. In addition to the surface geometry, we utilize the free-space information to avoid obstacles and determine collision-free fight paths. Our tool can be used to specify the region of interest and to plan trajectories. We demonstrate our method by obtaining a number of compelling 3D reconstructions, and provide a thorough quantitative evaluation showing improvement over previous state-of-the-art and regular patterns.
Video
Acknowledgments
We thank the NVIDIA Corporation for the donation of GPUs used in this work.