Abstract
Camera equipped drones are nowadays being used to explore large scenes and reconstruct detailed 3D maps. When free space in the scene is approximately known, an offline planner can generate optimal plans to efficiently explore the scene. However, for exploring unknown scenes, the planner must predict and maximize usefulness of where to go on the fly. Traditionally, this has been achieved using handcrafted utility functions. We propose to learn a better utility function that predicts the usefulness of future viewpoints. Our learned utility function is based on a 3D convolutional neural network. This network takes as input a novel volumetric scene representation that implicitly captures previously visited viewpoints and generalizes to new scenes. We evaluate our method on several large 3D models of urban scenes using simulated depth cameras. We show that our method outperforms existing utility measures in terms of reconstruction performance and is robust to sensor noise.
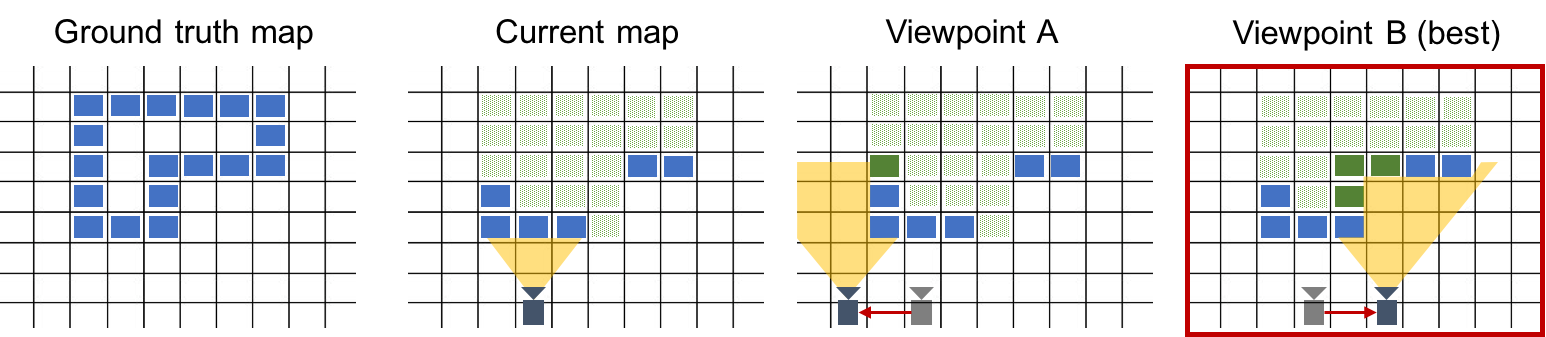
The exploration task (here depicted in 2D for clarity) is to discover occupied surface voxels (shown here in blue). Voxels are initially unknown (shown here in light green) and get discovered by taking a measurement, e.g., shooting rays from the camera into the scene. Voxels that are not surface voxels will be discovered as free voxels (shown here in white). Each possible viewpoint has a corresponding utility value depending on how much it contributes to our knowledge of the surface (shown here in dark green). To decide which viewpoint we should go to next, an ideal utility score function would tell us the expected utility of viewpoints before performing them. This function can then be used in a planing algorithm to visit a sequence of viewpoints with the highest expected utility.
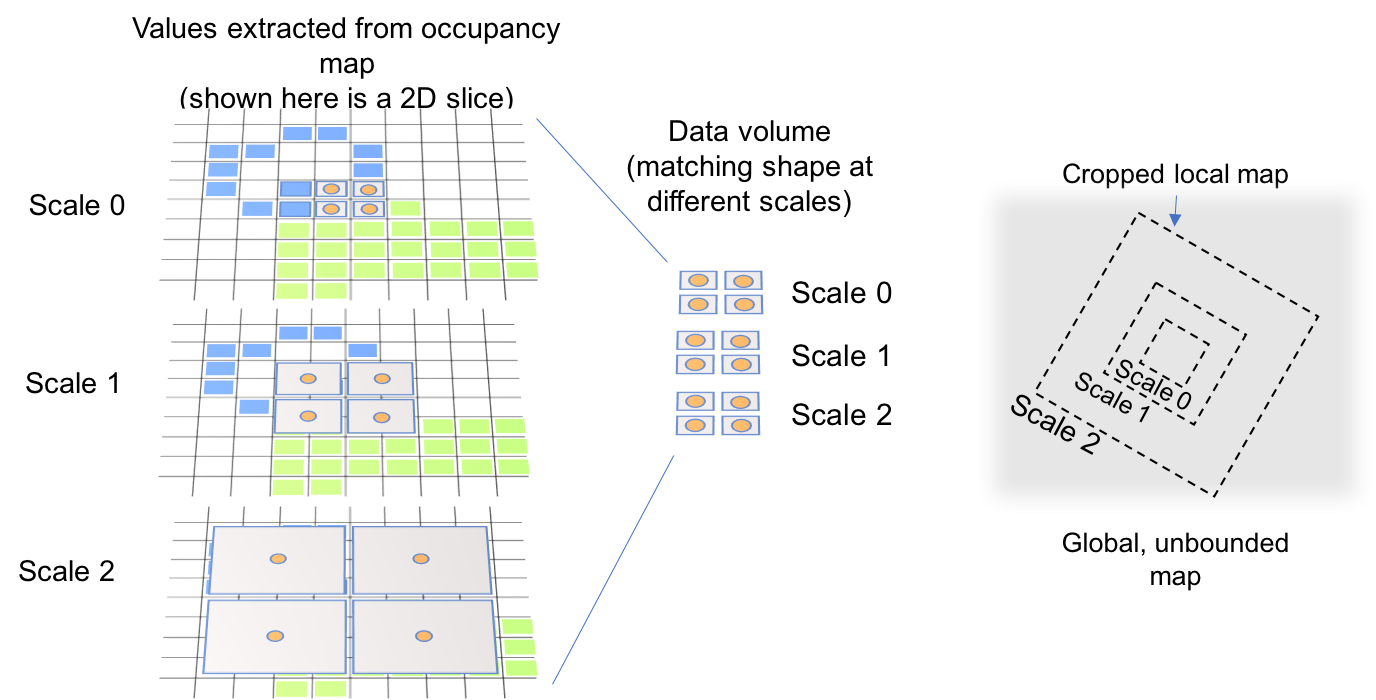
Local multi-scale representation of an occupancy map. For clarity of presentation we shows the 2D case for a grid of size 2 × 2. The occupancy map is sampled with 3D grids at multiple scales centered around the camera position. Sample points on different scales are shown in orange and their extent in gray. The resulting grids can be fed into a 3D convolutional neural network to predict the score of a viewpoint.
Acknowledgments
We thank the NVIDIA Corporation for the donation of GPUs used in this work.