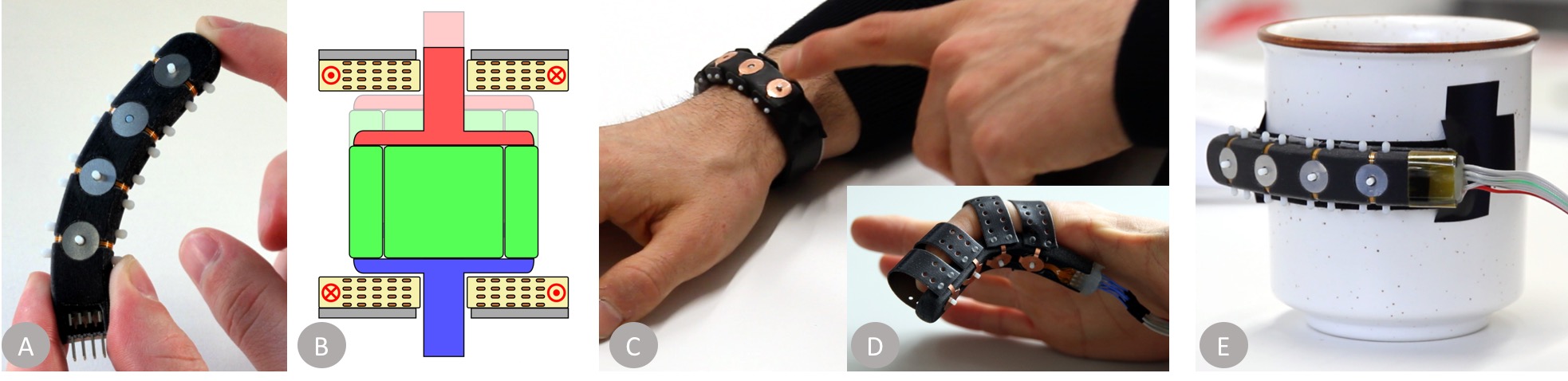
(A) MagTics is a flexible and wearable haptic interface that allows for localized haptic and tactile feedback.
(B) We solve the problem of actuation in soft materials by presenting a new fabrication technique that integrates
hard electromagnetic actuators in a soft holder, and by introducing a novel fast, but yet power efficient actuation technique.
Inside each actuator unit, a laterally shielded magnet (green) equipped with a pin on each extremity (blue and red) moves
vertically between two stable positions. MagTics can be worn on body (C-D) or attached to existing objects (E).
</p>
We present MagTics, a novel flexible and wearable haptic interface based on magnetically actuated bidirectional tactile pixels (taxels). MagTics' thin form factor and flexibility allows for rich haptic feedback in mobile settings. We propose a novel actuation mechanism based on bistable electromagnetic latching that combines high frame rate and holding force with low energy consumption and a soft and flexible form factor. We overcome limitations of traditional soft actuators by placing several hard actuation cells, driven by flexible printed electronics, in a soft 3D printed case. A novel EM-shielding prevents magnet-magnet interactions and allows for high actuator densities. A prototypical implementation comprising of 4 actuated pins on a 1.7 cm pitch, with 2 mm travel, and generating 160 mN to 200 mN of latching force is used to implement a number of compelling application scenarios including adding haptic and tactile display capabilities to wearable devices, to existing input devices and to provide localized haptic feedback in virtual reality. Finally, we report results of a psychophysical study, conducted to inform future developments and to identify possible application domains.
Abstract
Video
Downloads