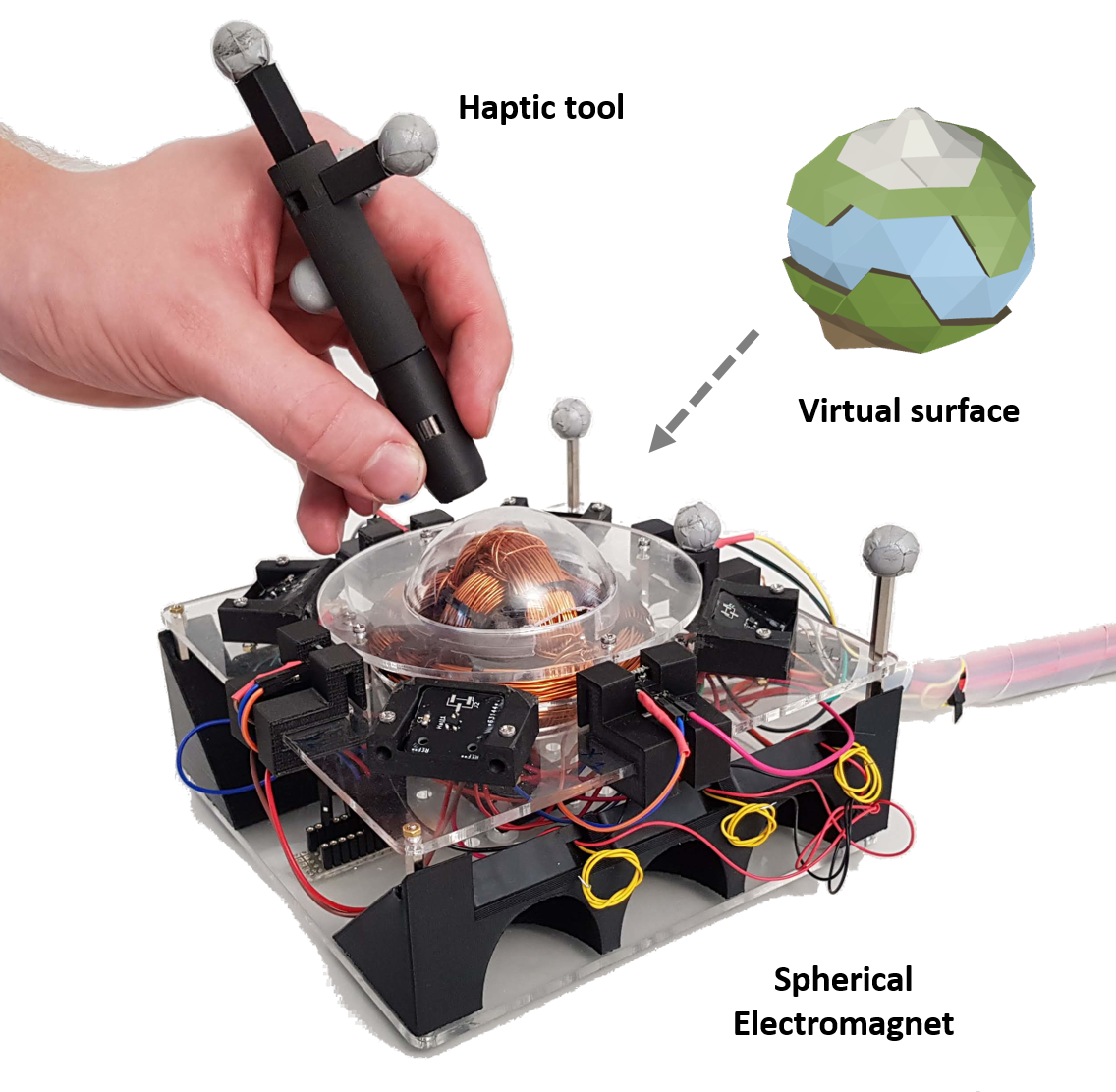
We introduce a novel contact-free mechanism to render haptic feedback onto a tracked stylus via a hemispherical electromagnet. An approximate model of the magnet interaction and a computationally efficient control strategy allow for the dynamic rendering of attracting and repulsive forces, for example, allowing users to explore virtual surfaces in a thin shell surrounding the device (inset).
Abstract
In this paper we introduce a novel contact-free volumetric haptic feedback device. A symmetric electromagnet is used in combination with a dipole magnet model and a simple control law to deliver dynamically adjustable forces onto a hand-held tool. The tool only requires an embedded permanent magnet and thus can be entirely untethered. The force, however, while contact-free, remains grounded via the spherical electromagnet and relatively large forces (1N at contact) can be felt by the user. The device is capable of rendering both attracting and repulsive forces in a thin shell around the electromagnet. We report findings from a user experiment with 6 participants, characterizing force delivery aspects and perceived precision of our system. We found that users can discern at least 25 locations for repulsive forces.