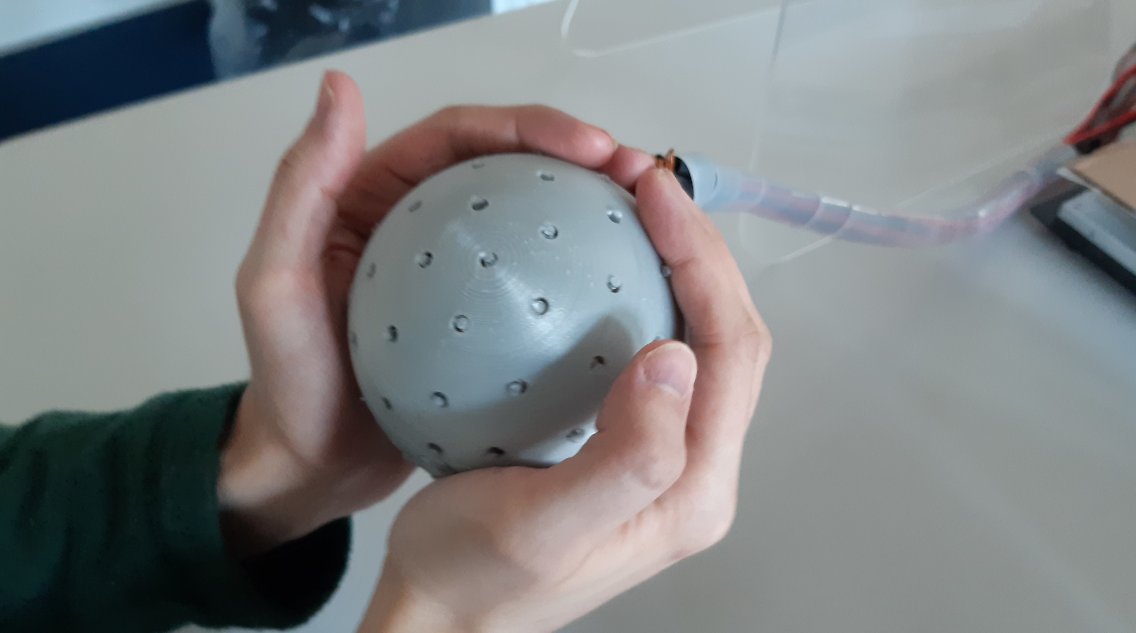
The Hedgehog Pin Array Haptic Interface, consisting of 86 hapticpins distributed over a 10 cm diameter spherical pin array. A central omni-directional electromagnet repels passive magnets attached to the haptic pins,causing them to push outwards against the user’s palms. To stabilize the system, the design contains a number of non-movable shielding magnets.
Abstract
We present Hedgehog, a single-actuator spherical pin-array device that produces cutaneous haptic sensations to the user’s palms. Hedgehog can enrich digital experiences by providing dynamic haptic patterns over a spherical surface using a simple, hand-held device. The key to our design is that it uses a single central actuator, a spherical omnidirectional electromagnet, to control the extension of all the 86 movable pins. This keeps our design simple to fabricate and scalable. A core challenge with this type of design is that the pins in the array, made out of permanent magnets, need to have a stable position when retracted. We present a method to compute such an arrays’ spatial stability, evaluate our hardware implementation in terms of its output force and pin’s extension and compare it against our method’s predictions. We also report our findings from three user studies investigating the perceived force and speed of traveling patterns. Finally, we present insights on the possible applications of Hedgehog.