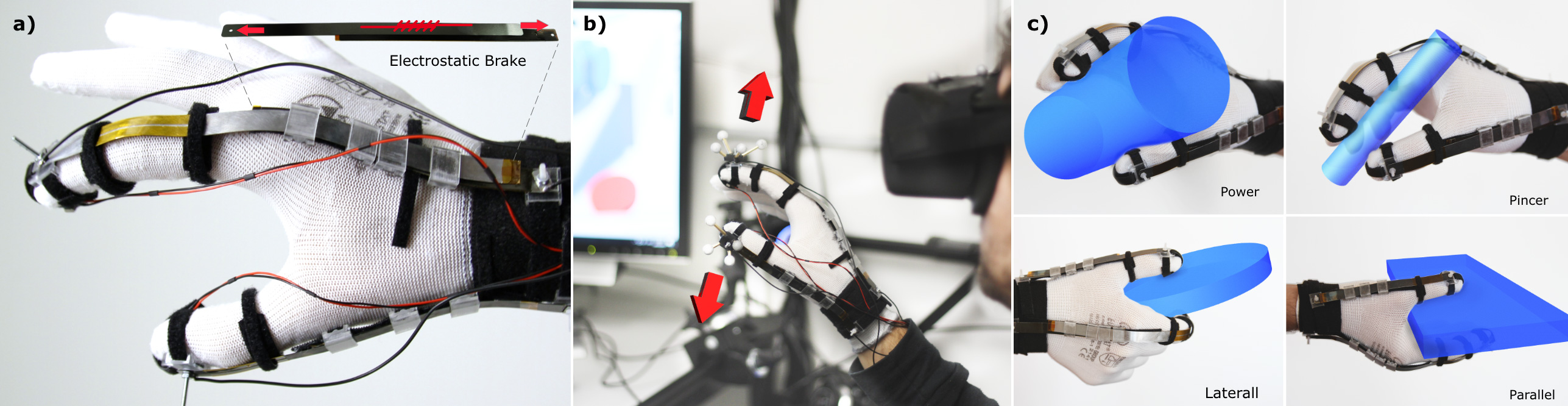
DextrES is a flexible and thin form-factor haptic feedback mechanism for precise manipulation of virtual objects in VR and AR. a) Our approach provides kinesthetic feedback via electrostatic brakes and piezoelectric actuators for cutaneous feedback. b) We experimentally show that DextrES improves precision of virtual object manipulations in VR across c) a number of different types of grasps, each affording different hand poses.
Abstract
We introduce DextrES, a flexible and wearable haptic glove which integrates both kinesthetic and cutaneous feedback in a thin and light form factor (weight is less than 8g). Our approach is based on an electrostatic clutch generating up to 20 N of holding force on each finger by modulating the electro-static attraction between flexible elastic metal strips to generate an electrically-controlled friction force. We harness the resulting braking force to rapidly render on-demand kinesthetic feedback. The electrostatic brake is mounted onto the the index finger and thumb via modular 3D printed articulated guides which allow the metal strips to glide smoothly. Cutaneous feedback is provided via piezo actuators at the fingertips. We demonstrate that our approach can provide rich haptic feedback under dexterous articulation of the user’s hands and provides effective haptic feedback across a variety of different grasps. A controlled experiment indicates that DextrES improves the grasping precision for different types of virtual objects. Finally, we report on results of a psycho-physical study which identifies discrimination thresholds for different levels of holding force.
Accompanying Video
Acknowledgments
This work was supported in part by a grant from the Hasler Foundation (Switzerland). We thank Simon Perrault for his help in the statistical analysis, Sahan Ayvaz for his contribution in the mechanical design, Alexandru Dancu for experiment design feedback, Lilia Leung for illustration work, Nadine Besse for mounting the piezo-actuators, Sam Schlatter for electronics advice, Juan Zarate for helpful discussions, and all participants for taking part in our experiments.